20Tutorial 08 - Estimating Hydrodynamic Derivatives and Coefficients
Question 01
For a ship with \(L = 200\) m and \(U = 12\) m/s, analyze how the ratio of nonlinear to linear contributions in yaw moment changes as rudder angle increases from \(5^{\circ}\) to \(35^{\circ}\) in \(15^{\circ}\) increments. Use:
\(N'_\delta = 0.15\)
\(N'_{\delta\delta\delta} = 0.08\)
Question 02
A ship executes a turning maneuver where its yaw rate follows Nomoto’s model with \(T = 10\) s and \(K = 0.1\) /s. Assuming a constant rudder angle \(\delta = 10^\circ\):
Calculate the percentage error in heading angle at \(t = 1\) s for both numerical schemes
Question 03
Consider a ship of length \(L=180\) m, breadth \(B=30\) m, draft \(T=11\) m. If \(x_G = 0\) determine the block coefficient (upto 4 demcimals) at which the ship’s straight line stability characteristics change. You may assume the empirical formulas for the hydrdodynamic derivatives.
Question 04
A straight-line test at \(U=1.5\) m/s gives:
\(\beta\) (deg)
\(Y\) (N)
2
3.3
4
6.3
6
9.9
8
13.3
10
16.9
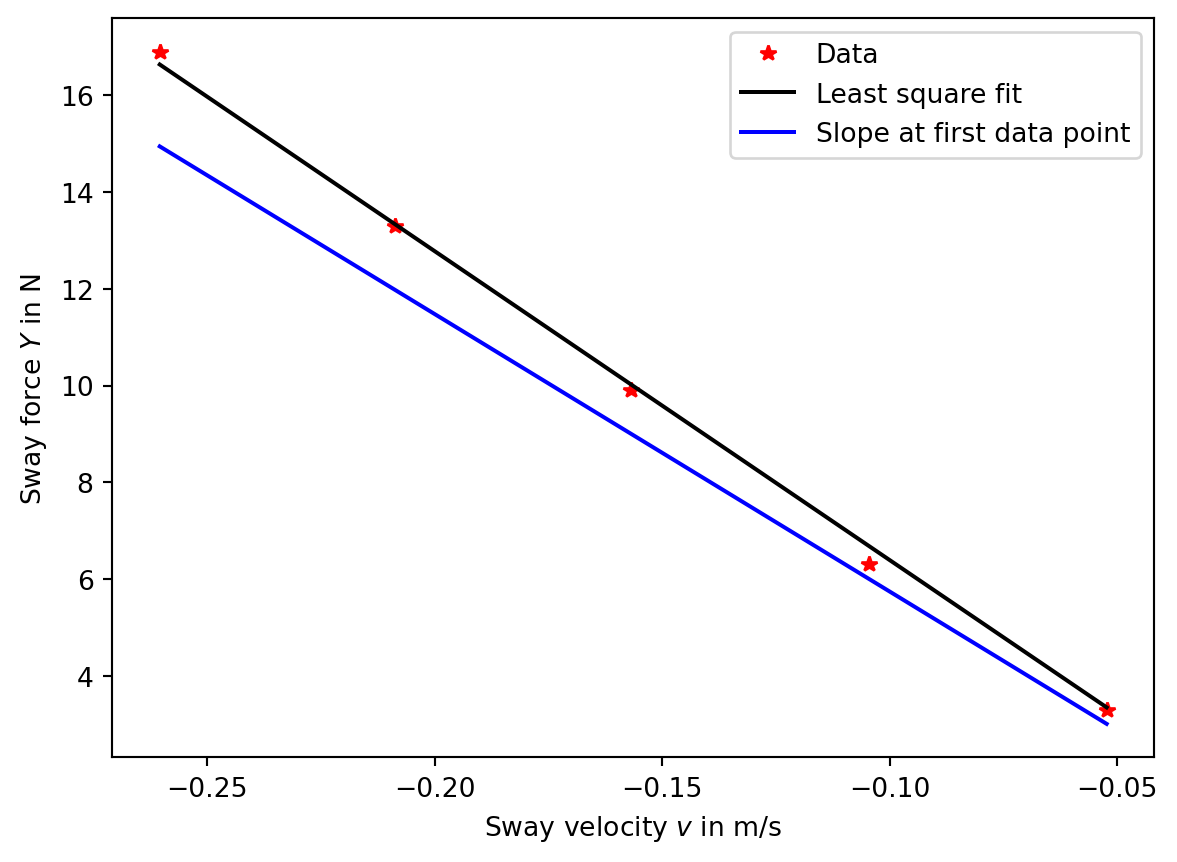
Compute \(Y_v\) using least squares fit through this data and compare it with the value obtained by computing slope numerically (using forward difference method) at the first data point.
Question 01 Solution
For a ship with \(L = 200\) m and \(U = 12\) m/s, analyze how the ratio of nonlinear to linear contributions in yaw moment changes as rudder angle increases from \(5^{\circ}\) to \(35^{\circ}\) in \(15^{\circ}\) increments. Use:
\(N'_\delta = 0.15\)
\(N'_{\delta\delta\delta} = 0.08\)
Code
import numpy as npdef solve_problem_1(): N_delta =0.15 N_delta_delta_delta =0.08 L =200 U =12 delta_list = np.arange(5, 40, 15) delta_list_rad = np.deg2rad(delta_list) N_linear = N_delta * delta_list_rad N_nonlinear = N_delta_delta_delta * delta_list_rad**3 ratio = N_nonlinear / N_linearprint(f"The ratio of nonlinear to linear contributions in yaw moment changes from {ratio[0]*100:.2f} % at {delta_list[0]:.0f} deg to {ratio[1]*100:.2f} % at {delta_list[1]:.0f} deg and to {ratio[2]*100:.2f} % at {delta_list[2]:.0f} deg\n")solve_problem_1()
The ratio of nonlinear to linear contributions in yaw moment changes from 0.41 % at 5 deg to 6.50 % at 20 deg and to 19.90 % at 35 deg
Question 02 Solution
A ship executes a turning maneuver where its yaw rate follows Nomoto’s model with \(T = 10\) s and \(K = 0.1\) /s. Assuming a constant rudder angle \(\delta = 10^\circ\):
Calculate the percentage error in heading angle at \(t = 1\) s for both numerical schemes
Code
import numpy as npdef solve_problem_2(): T =10 K =0.1 delta =10* np.pi /180 h =1 t =2# a) r_analytical = K * delta * (1- np.exp(-t/T)) psi_analytical = K * delta * (t - T * (1- np.exp(-t/T)))print(f"The heading angle at t = {t} s using analytical solution is {psi_analytical*180/np.pi:.4f} degrees\n")# b) ss0 = np.array([0, 0])def f(t, ss): psi = ss[0] r = ss[1] return np.array([r, (K * delta - r) / T]) ss1 = ss0 + h * f(0, ss0) ss2 = ss1 + h * f(h, ss1) psi_euler = ss2[0]print(f"The heading angle at t = {t} s using Euler scheme is {psi_euler*180/np.pi:.4f} degrees\n")# c) k1 = f(0, ss0) k2 = f(h/2, ss0 + h/2* k1) k3 = f(h/2, ss0 + h/2* k2) k4 = f(h, ss0 + h * k3) ss1 = ss0 + h * (k1 +2*k2 +2*k3 + k4) /6 k1 = f(h, ss1) k2 = f(h + h/2, ss1 + h/2* k1) k3 = f(h + h/2, ss1 + h/2* k2) k4 = f(h + h, ss1 + h * k3) ss2 = ss1 + h * (k1 +2*k2 +2*k3 + k4) /6 psi_rk4 = ss2[0]print(f"The heading angle at t = {t} s using RK4 scheme is {psi_rk4*180/np.pi:.4f} degrees\n")# d) error_euler = np.abs(psi_euler - psi_analytical) / psi_analytical *100 error_rk4 = np.abs(psi_rk4 - psi_analytical) / psi_analytical *100print(f"The percentage error in heading angle at t = {t} s using Euler scheme is {error_euler:.2f} %.\n")print(f"The percentage error in heading angle at t = {t} s using RK4 scheme is {error_rk4:.2f} %.\n")solve_problem_2()
The heading angle at t = 2 s using analytical solution is 0.1873 degrees
The heading angle at t = 2 s using Euler scheme is 0.1000 degrees
The heading angle at t = 2 s using RK4 scheme is 0.1873 degrees
The percentage error in heading angle at t = 2 s using Euler scheme is 46.61 %.
The percentage error in heading angle at t = 2 s using RK4 scheme is 0.00 %.
Question 03 Solution
Consider a ship of length \(L=180\) m, breadth \(B=30\) m, draft \(T=11\) m. If \(x_G = 0\) determine the block coefficient (upto 4 demcimals) at which the ship’s straight line stability characteristics change. You may assume the empirical formulas for the hydrdodynamic derivatives.
Compute \(Y_v\) using least squares fit through this data and compare it with the value obtained by computing slope numerically (using forward difference method) at the first data point.
Code
import numpy as npimport matplotlib.pyplot as pltdef solve_problem_4(): U =1.5 bet = np.deg2rad(np.array([2, 4, 6, 8, 10])) Y = np.array([3.3, 6.3, 9.9, 13.3, 16.9]) v =-np.sin(bet) * U Yv = np.sum(Y*v) / np.sum(v**2)print(f"Least square fit: {Yv:.2f}") slope0 = (Y[1] - Y[0])/(v[1] - v[0])print(f"Slope at first data point: {slope0:.2f}") plt.plot(v,Y,'r*',label='Data') plt.plot(v, Yv*v,'k', label='Least square fit') plt.plot(v, slope0*v,'b', label='Slope at first data point') plt.xlabel('Sway velocity $v$ in m/s') plt.ylabel('Sway force $Y$ in N') plt.legend()solve_problem_4()
Least square fit: -63.88
Slope at first data point: -57.38