Code
import numpy as np
def solve_problem_1():
t = 4
rt = 0.005
r0 = 0.01
T = t / (np.log(r0) - np.log(rt))
print(f"The time constant is {T:.2f} seconds")
solve_problem_1()The time constant is 5.77 secondsThe yaw rate of a ship in a control fixed scenario (\(\delta = 0^{\circ}\)) changes from \(0.01 ~ rad/s\) to \(0.005 ~rad/s\) over \(4~s\) time. Estimate the time constant of the ship.
A ship has the following non-dimensional parameters: \(m' = 0.2\), \(x_G' = 0.1\), \(Y_v' = -0.4\), \(Y_r' = 0.15\), \(N_v' = -0.05\), \(N_r' = -0.1\), \(Y_\delta' = 0.3\). Calculate the turning radius \(R\) for a rudder angle \(\delta = 5^{\circ}\) if the length of the ship is \(L = 100\) m.
Consider a ship of length \(L=150~m\) and a design speed of \(U=12~knots\) with \(K'=-1\) and \(T'=2\). For an applied constant rudder of \(\delta = 20^{\circ}\), determine:
The radius of the turn in meters
Time for the yaw rate to reach \(63.2 \%\) of the steady value in the turn from the nominal operating condition. Compare it with the Nomoto time constant of the ship.
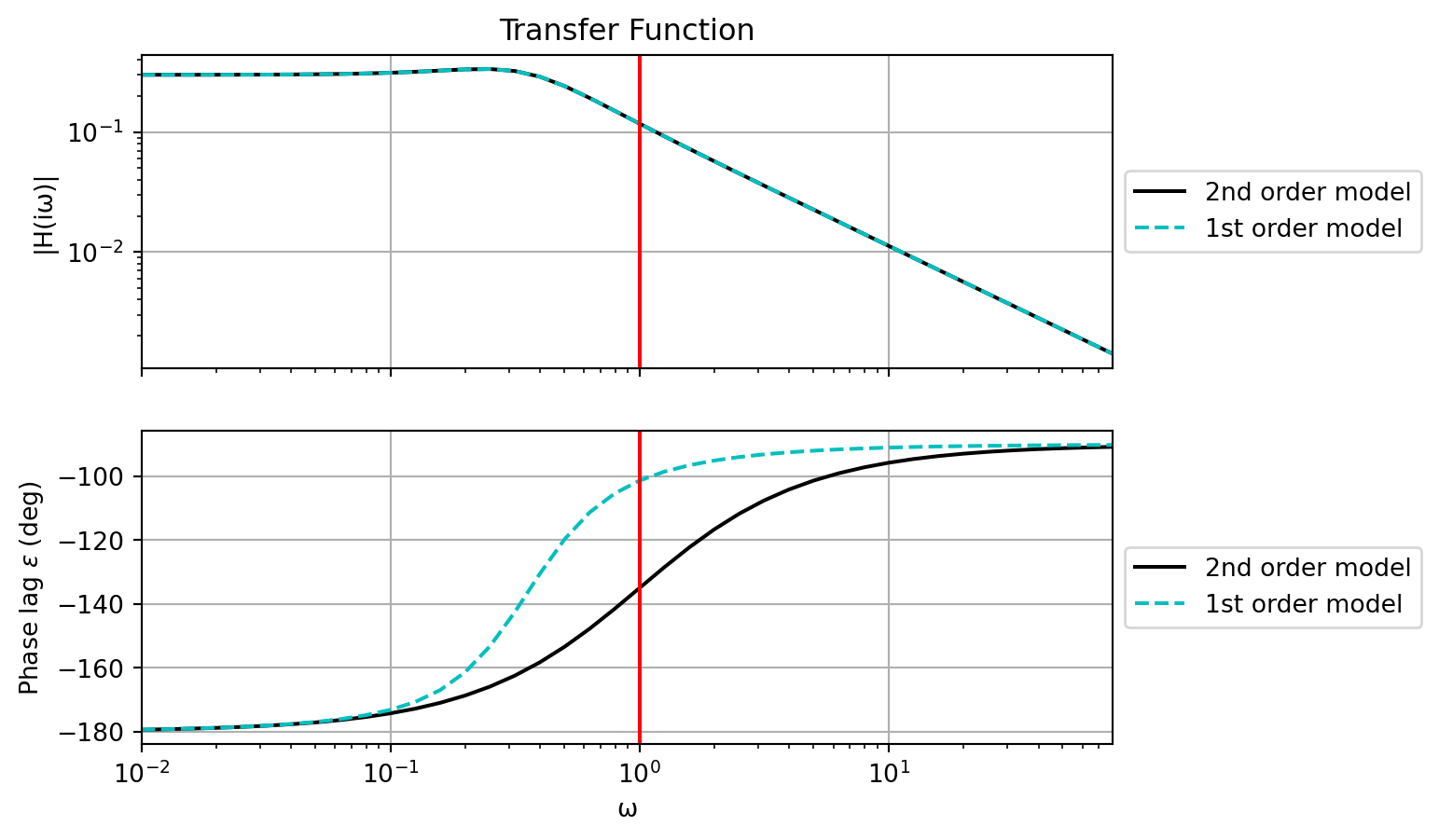
Consider a second-order Nomoto model that has the following transfer function:
\[\begin{align} \frac{r_0}{\delta_0} = -\left(\frac{0.3 + 0.9s}{1 + 4s + 8s^2}\right) \nonumber \end{align}\]
Locate the poles of the transfer function and comment on the stability of the system
Determine the time constants of the system
Write down the equivalent first-order transfer function
Cut-off frequency for a system is defined as the frequency at which the amplitude ratio is \(\frac{1}{\sqrt{2}}\) of the steady-state value (value at \(\omega = 0\)). Determine the cut-off frequency for the first-order model. Calculate the phase lag for first-order and second-order system at this frequency and compare them.
The yaw rate of a ship in a control fixed scenario (\(\delta = 0^{\circ}\)) changes from \(0.01 ~ rad/s\) to \(0.005 ~rad/s\) over \(4~s\) time. Estimate the time constant of the ship.
import numpy as np
def solve_problem_1():
t = 4
rt = 0.005
r0 = 0.01
T = t / (np.log(r0) - np.log(rt))
print(f"The time constant is {T:.2f} seconds")
solve_problem_1()The time constant is 5.77 secondsA ship has the following non-dimensional parameters: \(m' = 0.2\), \(x_G' = 0.1\), \(Y_v' = -0.4\), \(Y_r' = 0.15\), \(N_v' = -0.05\), \(N_r' = -0.1\), \(Y_\delta' = 0.3\). Calculate the turning radius \(R\) for a rudder angle \(\delta = 5^{\circ}\) if the length of the ship is \(L = 100\) m.
import numpy as np
def solve_problem_2():
L = 100
m_prime = 0.2
x_G_prime = 0.1
Y_v_prime = -0.4
Y_r_prime = 0.15
N_v_prime = -0.05
N_r_prime = -0.1
Y_delta_prime = 0.3
K_prime = (N_v_prime * Y_delta_prime - Y_v_prime * Y_delta_prime) / ((N_r_prime - m_prime * x_G_prime) * Y_v_prime - (Y_r_prime - m_prime) * N_v_prime)
delta = 5 * np.pi / 180
R = L / (K_prime * delta)
print(f"The turning radius is {R:.2f} m\n")
solve_problem_2()The turning radius is 496.56 m
Consider a ship of length \(L=150~m\) and a design speed of \(U=12~knots\) with \(K'=-1\) and \(T'=2\). For an applied constant rudder of \(\delta = 20^{\circ}\), determine:
The radius of the turn in meters
Time for the yaw rate to reach \(63.2 \%\) of the steady value in the turn from the nominal operating condition. Compare it with the Nomoto time constant of the ship.
import numpy as np
def solve_problem_3():
L = 150
U = 12 * 0.514444
Kp = -1
Tp = 2
K = Kp * U / L
T = Tp * L / U
delta = 20 * np.pi / 180
R = U / np.abs(K * delta)
t = -T * np.log(1 - 0.632)
print(f"The radius of the turn is {R:.2f} m")
print(f"The time for the yaw rate to reach 63.2% of the steady value is {t:.2f} seconds")
solve_problem_3()The radius of the turn is 429.72 m
The time for the yaw rate to reach 63.2% of the steady value is 48.58 secondsConsider a second-order Nomoto model that has the following transfer function:
\[\begin{align} \frac{r_0}{\delta_0} = -\left(\frac{0.3 + 0.9s}{1 + 4s + 8s^2}\right) \nonumber \end{align}\]
Locate the poles of the transfer function and comment on the stability of the system
Determine the time constants of the system
Write down the equivalent first-order transfer function
Cut-off frequency for a system is defined as the frequency at which the amplitude ratio is \(\frac{1}{\sqrt{2}}\) of the steady-state value (value at \(\omega = 0\)). Determine the cut-off frequency for the first-order model. Calculate the phase lag for first-order and second-order system at this frequency and compare them.
import numpy as np
import matplotlib.pyplot as plt
def solve_problem_4():
K = -0.3
T_3 = 3.0
a = 8
b = 4
c = 1
s_1 = (-b + 1j * np.sqrt(4*a*c - b**2)) / (2*a)
s_2 = (-b - 1j * np.sqrt(4*a*c - b**2)) / (2*a)
print(f"14. For the second-order model:\n")
print(f"(a) The poles of the transfer function are {s_1:.2f} and {s_2:.2f}. The system is {'stable' if np.real(s_1) < 0 and np.real(s_2) < 0 else 'unstable'}.\n")
T_1 = -1/s_1
T_2 = -1/s_2
print(f"(b) The time constants of the system are T_1 = {T_1:.2f} s, T_2 = {T_2:.2f} s and T_3 = {T_3:.2f} s.\n")
T = T_1 + T_2 - T_3
print(f"(c) The equivalent first-order transfer function is {K:.2f}/(1 + {np.real(T):.2f}s)\n")
wc = 1 / T
sc = 1j * wc
TF2_wc = - ((0.3+0.9*sc)/(1 + 4*sc + 8*sc**2))
TF1_wc = - 0.3 / (1 + T*sc)
eps2 = np.degrees(np.angle(np.conj(TF2_wc)))
eps1 = np.degrees(np.angle(np.conj(TF1_wc)))
print(f"(d) The cut-off frequency for the first-order model is {np.real(1/T):.2f} rad/s.\n")
print(f"\tThe phase lag for 1st order system is {eps1:.2f} degrees")
print(f"\tThe phase lag for 2nd order system is {eps2:.2f} degrees")
w = 10**np.arange(-2,2,0.1)
s = 1j * w
TF2 = - ((0.3+0.9*s)/(1 + 4*s + 8*s**2))
phase_lag2 = np.degrees(np.angle(np.conj(TF2)))
mag2 = np.abs(TF2)
TF1 = -0.3/(1+s)
phase_lag1 = np.degrees(np.angle(np.conj(TF1)))
mag1 = np.abs(TF1)
fig, (ax1, ax2) = plt.subplots(2, 1, sharex=True)
ax1.loglog(w, mag2,'k', label="2nd order model")
ax1.loglog(w, mag1,'c--', label="1st order model")
ymin1, ymax1 = ax1.get_ylim()
ax1.plot(np.array([1/T, 1/T]), np.array([ymin1, ymax1]),'r')
ax1.set_ylabel("|H(iω)|")
ax1.set_title("Transfer Function")
ax1.grid(True)
ax1.set_xlim(w[0], w[-1])
ax1.set_ylim(ymin1, ymax1)
ax1.legend(loc="center left", bbox_to_anchor=(1, 0.5))
ax2.semilogx(w, phase_lag1,'k', label="2nd order model")
ax2.semilogx(w, phase_lag2,'c--', label="1st order model")
ymin2, ymax2 = ax2.get_ylim()
ax2.plot(np.array([1/T, 1/T]), np.array([ymin2, ymax2]),'r')
ax2.set_xlabel("ω")
ax2.set_ylabel("Phase lag $\epsilon$ (deg)")
ax2.grid(True)
ax2.set_xlim(w[0], w[-1])
ax2.set_ylim(ymin2, ymax2)
ax2.legend(loc="center left", bbox_to_anchor=(1, 0.5))
plt.show()
solve_problem_4()14. For the second-order model:
(a) The poles of the transfer function are -0.25+0.25j and -0.25-0.25j. The system is stable.
(b) The time constants of the system are T_1 = 2.00+2.00j s, T_2 = 2.00-2.00j s and T_3 = 3.00 s.
(c) The equivalent first-order transfer function is -0.30/(1 + 1.00s)
(d) The cut-off frequency for the first-order model is 1.00 rad/s.
The phase lag for 1st order system is -135.00 degrees
The phase lag for 2nd order system is -101.31 degrees/home/abhilash/miniconda3/lib/python3.8/site-packages/matplotlib/cbook/__init__.py:1340: ComplexWarning:
Casting complex values to real discards the imaginary part